Obxectivos
- Aplicar o aprendido á programación do robot educativo Ranger.
- Familiarizarse coa estructura e os componentes do Ranger.
- Entender a función de cada un dos componentes: cerebro e sensores.
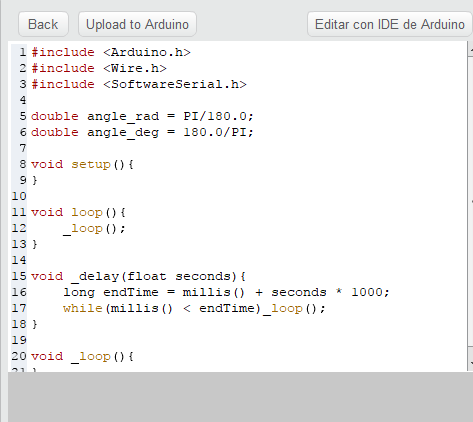
- Comparar Scratch con M-block.
- Crear programas sinxelos con M-block
- Probar o funcionamento dos programas creados no robot