Un ambiente con buena iluminación tiene un impacto significativo el estado de ánimo, la energía y el bienestar de las personas. Por el contrario, una iluminación deficiente puede provocar fatiga visual, dolores de cabeza, estrés y una disminución de la concentración y la motivación.
La luminosidad adecuada en el lugar de trabajo es fundamental, por lo que es un factor que debéis controlar en vuestra aula inteligente.
Para lograrlo, podéis automatizar un sistema de paneles o de estores que os ayuden a regular la luz natural que entra por las ventanas. Para este reto elegiréis actuadores mecánicos como el servomotor o el motor de corriente continua.
A continuación, podéis ver un ejemplo de una propuesta, pero hay muchas soluciones creativas posibles. ¡Seguro que podéis imaginarlas y construirlas!
Aprovechando los sensores de luz, la programación se puede realizar de dos formas:
En el menú del modelo Abalar: APLICACIONES >> PROGRAMACIÓN >> mBlock5-Online.
La programación es simple, pero, para ayudaros, aquí tenéis algunas pautas:
Crea un bucle que comience con un evento (puede ser interesante grabar el programa en la placa Mbot Ranger a través de USB y que comience cuando se encienda).
Crea una variable para todos los objetos para almacenar el valor del sensor de luz.
Recuerda que necesitarás usar varios bucles condicionales (IF) para establecer los niveles de luz, según la variable que almacena el valor del sensor.
En cada condición, programa la actuación que consideres (la rotación que necesitas del servomotor, para tener más o menos luz en el aula).
Un servomotor es un actuador, en este caso un motor rotativo, que permite un control preciso de su posición, ángulo, aceleración y velocidad.
Lectura facilitada
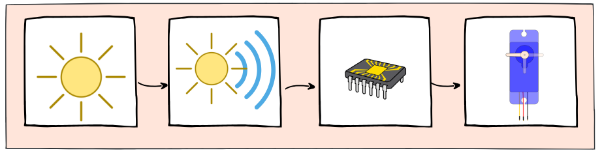
Estímulo luz Sensor de luz Microcontrolador Servomotor
Un ambiente bien iluminado mejora el estado de ánimo, la energía y el bienestar de las personas.
Por el contrario, una iluminación deficiente causa fatiga visual, dolores de cabeza y estrés.
Una iluminación deficiente disminuye la concentración y motivación.
La luminosidad adecuada es importante para nuestro lugar de trabajo.
Por lo tanto, la luminosidad adecuada es un factor a incluir en nuestra aula inteligente.
Podemos automatizar un sistema de paneles o estores.
Estos paneles o estores regulan la luz natural que entra por las ventanas.
Elegiremos actuadores mecánicos del tipo servomotor o motor de corriente continua para este reto.
Podemos aprovechar el sensor de sonido y los LED integrantes de la placa.
La programación de la placa puede hacerse a través de:
El menú de la maqueta Abalar: Aplicativos >> Programación >>Mblocks5-Online.
La programación es sencilla.
Tienes una ayuda a continuación:
1. Creamos un bucle que se inicie con un evento.
Es interesante grabar el programa en la placa Mbot Ranger mediante USB.
Es interesante que el programa grabado se inicie al encender la placa Mbot Ranger.
2. Crearéis una variable para todos los objectos.
El valor del sensor se almacena en la variable.
3. Hay que usar varios bucles condicionales (SI) para establecer los niveles de luz según la variable que almacena el valor del sensor.
Esto cambia en función de la variable.
4. Programaréis la actuación que consideréis en cada condición.
Programaréis el giro que necesitéis del servomotor.
El giro del servomotor varía para tener más o menos luz en el aula.
Control del ruido con la placa Auriga y un servomotor
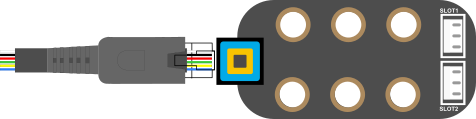
Para poder utilizar servomotores con la placa Auriga, necesitáis el adaptador RJ25 del fabricante. El nombre RJ25 en realidad se refiere al tipo de conector del adaptador a la placa. Este adaptador RJ25 se puede conectar a cualquiera de los puertos de color negro, amarillo y azul, es decir, cualquiera de los puertos del 6 al 10.
Para cada adaptador RJ45, se dispone de dos ranuras o conexiones donde podéis conectar un servomotor y un sensor externo como un interruptor de parada o final de carrera, por ejemplo.
Debéis conectar el servomotor a los pines de la ranura 1 del adaptador con sus tres cables: datos, alimentación y GND o tierra.
Lectura facilitada
Control coa placa Auriga y servomotor
Los servomotores requieren el adaptador RJ25 del fabricante para usarse con la placa Auriga.
El nombre RJ25 se refiere al tipo de conector del adaptador a la placa.
El adaptador RJ25 se puede conectar a cualquiera de los puertos de color negro, amarillo y azul.
Por tanto, el adaptador RJ25 se puede conectar a cualquiera de los puertos del 6 al 10.
Cada adaptador RJ45 tiene dos ranuras o conexiones.
Podemos conectar un servomotor y un sensor externo como un final de carrera en estas dos ranuras o conexiones.
Conectamos el servomotor a los pines de la ranura 1 del adaptador.
El servomotor tiene los siguientes tres cables para la conexión:
Datos.
Alimentación.
GND o tierra.
¿Necesitas ayuda con los bloques?
Para la programación del servomotor en mBlock 5 online necesitáis una serie de bloques que se encuentran dentro de la extensión "Plataforma del fabricante":
Lectura facilitada
Los bloques necesarios para la programación del servomotor están dentro de la extensión Plataforma del fabricante.
Memoria técnica: análisis, investigación y diseño
Duración:
90 minutos
Agrupamiento:
3-5
Como sabéis, la documentación técnica es muy importante para analizar, diseñar y planificar el proyecto.
A continuación, tenéis las indicaciones que os servirán para completar la información en la memoria técnica.
Memoria técnica (2 de 3)
Análisis e investigación
Debéis contestar a las dos preguntas de análisis formuladas en la tabla 3 de la memoria técnica del proyecto. En ellas, es importante reflejar las conclusiones del análisis sobre la necesidad de hacer cambios en el aula para mejorar el bienestar del profesorado y alumnado.
Además, es fundamental llevar a cabo una investigación del problema con el fin de obtener ideas. Para ello, podéis echar mano de los recursos disponibles en la biblioteca, buscar información en Internet o inspiraros en edificios de vuestro entorno que cuenten con sistemas de domótica.
Propuesta de ideas
Tras llevar a cabo el proceso de investigación, cada persona del grupo debe hacer un diseño individual de la maqueta que queréis construir. Luego, es importante, que, entre todo el equipo y de forma democrática, se elija alguno de los diseños propuestos para su construcción.
Debéis utilizar la tabla 16, que se encuentra como anexo 2 en la memoria técnica del proyecto. En esta tabla, es fundamental incluir las valoraciones de las propuestas presentadas por cada persona del equipo, teniendo en cuenta los siguientes aspectos:
Originalidad.
Que sea realizable, es decir, comprobar que se cuenta con los materiales y las herramientas necesarias.
Que sea ajustada al tiempo disponible para su ejecución.
Cumple todos los requisitos del reto.
Diseño
Debéis representar la propuesta de la maqueta del aula elegida por el grupo en las tablas 7.1 y 7.2 de la memoria técnica. Debéis elegir una de las siguientes alternativas para reflejar vuestro diseño en la documentación:
Captura de pantalla de un modelo 3D, realizada en TinkerCAD o un software similar.
Diseños 2D (alzado y planta) acotados, realizados en LibreOffice Draw o a mano.
La parte mecánica
Cualquier edificio dispone de algún sistema, generalmente manual, que permite la regulación de la luminosidad. Normalmente, estos sistemas cuentan con algún elemento mecánico que permite su funcionamiento, como es el caso de las persianas o los estores.
Ahora, llega el momento de que penséis el sistema que utilizaréis para la regulación de entrada de luz a través de la ventana o ventanas de vuestra aula. Este puede ser un sistema corredizo o basculante, con un solo hueco o con múltiples...
Lectura facilitada
Debéis pensar cómo regular la luz que entra por la ventana.
El sistema regulador de luz puede ser corredizo o basculante.
El sistema regulador de luz puede ser con un solo hueco o con múltiples.
Hora de diseñar
Además de programar la placa, debes construir la maqueta del aula y los sistemas precisos para colocar ordenadamente la placa, los sensores y los actuadores.
Ponte manos a la obra y haz un boceto de la idea inicial del sistema de control de iluminación. Compártelo con sus compañeros y/o compañeras de equipo y debate cuál es el mejor para tu proyecto. Puedes cualificarlo en función de lo siguiente rúbrica:
Vosotros debéis construir los sistemas precisos para colocar ordenadamente la placa, sensores y actuadores en la maqueta.
¡Manos a la obra!
Tú debes realizar un boceto de la idea inicial del sistema para el control de ruido.
Tú debes compartir tu boceto con el resto del equipo.
Ahora, los miembros del equipo debéis debatir sobre cuál es la mejor opción para vuestro proyecto.
¿Cómo se puntúa el proyecto?
Rúbrica para la evaluación del Reto 2
Memoria técnica: construcción del proyecto
Duración:
3-5 sesiones
Agrupamiento:
3-5 participantes
Para esta actividad disponéis del diario de construcción (tabla 11) de la memoria técnica. En este apartado, debéis recoger las operaciones realizadas durante el proceso de elaboración del proyecto. Completad el diario de construcción en cada sesión para que os facilite el seguimiento del proceso.
Ejemplo de entrada en el diario de construcción
Reflexiona en el diario de aprendizaje
Después de mucho trabajo, el grupo consiguió el reto final. Fueron días de compartir conocimientos, superar dificultades y poner en común las herramientas y habilidades que contribuyeron a la resolución del reto final. Además de la satisfacción por el trabajo bien hecho, lo que aprendisteis en este reto os servirá en un futuro para resolver situaciones similares.
En esta sección, debes realizar las valoraciones incluidas el bloque 4 del diario de aprendizaje.






 Análisis e investigación
Análisis e investigación Propuesta de ideas
Propuesta de ideas
 Diseño
Diseño



